学习舞蹈动作可以帮助人形机器人更好地与人类合作
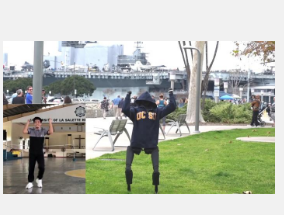
加州大学圣地亚哥分校的工程师们训练了一个人形机器人,让它毫不费力地学习和表演各种富有表现力的动作,包括简单的舞蹈动作和挥手、击掌和拥抱等手势,同时还能在各种地形上保持稳定的步态。
这种人形机器人的表现力和灵活性增强,为改善工厂装配线、医院和家庭等环境中的人机交互铺平了道路,在这些环境中,机器人可以安全地与人类一起操作,甚至可以在实验室或灾难现场等危险环境中取代人类。
“通过富有表现力和更像人类的身体动作,我们旨在建立信任并展示机器人与人类和谐共存的潜力,”加州大学圣地亚哥分校雅各布斯工程学院电气与计算机工程系教授王小龙表示。“我们正在努力帮助重塑公众对机器人的认识,让它们成为友好和协作的机器人,而不是像终结者那样令人恐惧的机器人。”
王和他的团队将在 2024 年机器人:科学与系统会议上展示他们的研究成果,该会议将于 7 月 15 日至 19 日在荷兰代尔夫特举行。
这款人形机器人如此富有表现力的原因在于,它接受了各种人体动作的训练,因此能够概括新的动作并轻松模仿。就像一个快速学习的舞蹈学生一样,机器人可以快速学习新的动作和手势。
为了训练机器人,该团队使用了大量的动作捕捉数据和舞蹈视频。他们的技术包括分别训练上半身和下半身。这种方法使机器人的上半身能够复制各种参考动作,例如跳舞和击掌,而它的腿则专注于稳定的踏步动作以保持平衡并穿越不同的地形。
“这里的主要目标是展示机器人在行走过程中不摔倒的能力,”王说。
尽管上半身和下半身的训练是分开的,但机器人的整个结构都遵循统一的策略运行。这种协调的策略确保机器人能够做出复杂的上半身动作,同时在碎石、泥土、木屑、草地和倾斜的混凝土路径等地面上稳定行走。
模拟首先在虚拟人形机器人上进行,然后转移到真实机器人上。机器人展示了在真实世界中执行学习到的动作和新动作的能力。
目前,机器人的动作由人类操作员使用游戏控制器控制,由游戏控制器决定其速度、方向和具体动作。该团队设想的未来版本将配备摄像头,使机器人能够自主执行任务和导航地形。
该团队目前正致力于改进机器人的设计,以应对更复杂、更精细的任务。“通过扩展上身的功能,我们可以扩大机器人可以执行的动作和手势范围,”王说。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。