东京工业大学的研究人员表明,紫外激光加工是一种很有前途的技术,可用于开发复杂的微结构,实现肌肉细胞的复杂排列,这是构建逼真的生物混合致动器所需的。与传统的复杂方法相比,这种创新技术可以轻松快速地制造具有复杂图案的微结构,以实现不同的肌肉细胞排列,为能够进行复杂、灵活运动的生物混合执行器铺平了道路。
仿生机器人模仿生物体的运动和生物功能,是一个令人着迷的研究领域,它不仅可以带来更高效的机器人,而且可以作为理解肌肉生物学的平台。其中,生物混合执行器由软材料和肌肉细胞组成,可以复制实际肌肉的力量,有潜力实现逼真的运动和功能,包括自愈、高效率和高功率重量比这对于需要大量能源的传统笨重机器人来说是很困难的。实现这些逼真运动的一种方法是以各向异性方式在生物混合执行器中排列肌肉细胞。这涉及到以特定的模式排列它们,使它们朝向不同的方向,就像在生物体中发现的那样。虽然之前的研究报告了使用这种技术进行显着运动的生物混合执行器,但它们主要集中在各向异性地沿直线排列肌肉细胞,从而仅产生简单的运动,而不是天然肌肉组织的复杂运动,例如扭转、弯曲、和缩小。真实的肌肉组织具有复杂的肌肉细胞排列,包括弯曲和螺旋图案。
创建如此复杂的排列需要在基底上形成弯曲的微槽(MG),然后将其作为按照所需图案排列肌肉细胞的指导。复杂MG的制造已通过光刻、波浪显微照相和微接触印刷等方法实现。然而,这些方法涉及多个复杂的步骤,不适合快速制造。
为了解决这个问题,东京工业大学(Tokyo Tech)生命科学与技术学院 Toshinori Fujie 副教授领导的研究小组开发了一种用于制造复杂微结构的紫外(UV)激光加工技术。“根据我们之前的原型,我们假设使用 SBS(硬橡胶)薄膜和通过紫外激光加工制造的任意各向异性 MG 的生物混合执行器可以控制任意各向异性方向上的细胞排列,从而再现更逼真的灵活运动,”藤杰博士解释道。他们的研究发表在《生物制造》杂志上。
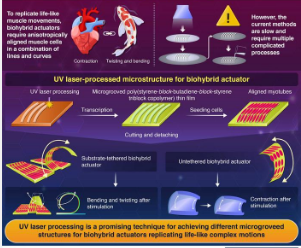
这项新技术包括通过紫外激光加工在聚酰亚胺上形成弯曲的 MG,然后将其转录到由 SBS 制成的薄膜上。接下来,在生物体中发现的称为肌管的骨骼肌细胞使用 MG 进行排列,以实现各向异性的弯曲肌肉模式。研究人员使用这种方法开发了两种不同的生物混合致动器:一种束缚在玻璃基板上,另一种则不受束缚。在电刺激下,两个执行器通过类似扭转的运动而变形。有趣的是,由于肌管像天然括约肌一样弯曲排列,生物混合执行器在不受束缚时转变成 3D 独立结构。
“这些结果表明,与传统方法相比,紫外激光加工是制造可调谐 MG 图案的更快、更容易的方法。这种方法为通过肌管的引导对准来实现更逼真的生物混合执行器提供了有趣的机会,” Fujie 博士评论道,并强调了这项创新技术的潜力。
总的来说,这项研究证明了紫外激光加工在制造不同的各向异性肌肉组织图案方面的潜力,为能够进行复杂、灵活运动的更逼真的生物混合致动器铺平了道路!
