360度平视显示器可以实时告驾驶员道路障碍物
研究人员开发了一种增强现实平视显示器,可以通过将潜在危险直接实时显示在驾驶员视野中的高分辨率三维全息图来提高道路安全。
当前的平视显示系统仅限于在车辆挡风玻璃上进行二维投影,但来自剑桥大学、牛津大学和伦敦大学学院 (UCL) 的研究人员开发了一种系统,使用 3D 激光扫描仪和 LiDAR 数据来创建完整的伦敦街道的 3D 表示。
他们开发的系统可以有效地“透视”物体,投射隐藏在驾驶员视野之外的道路障碍物的全息表示,并在大小和距离上与真实物体保持一致。例如,被大型卡车挡住的道路标志将显示为 3D 全息图,以便驾驶员确切地知道该标志的位置以及它显示的信息。
3D全息投影技术使驾驶员的注意力集中在道路上而不是挡风玻璃上,并且可以通过从任何角度实时投影道路障碍物和潜在危险来提高道路安全。研究结果发表在《先进光学材料》杂志上。
每天,约有 16,000 人因人为失误造成的交通事故丧生。技术可以用来减少这一数字并改善道路安全,部分方法是向驾驶员提供有关潜在危险的信息。目前,这主要是使用平视显示器来完成的,它可以提供当前速度或行驶方向等信息。
剑桥大学工程系的贾娜·斯基纽斯卡娅 (Jana Skirnewskaja)表示:“平视显示器背后的想法是,它可以让驾驶员的眼睛保持向上,因为即使只有不到一秒钟的时间不看路,也足以发生事故。”研究的第一作者。“然而,由于这些是二维图像,投射到挡风玻璃的一小块区域上,驾驶员可以看到图像,而不是真正看到前方的道路。”
多年来,Skirnewskaja 和她的同事一直致力于开发平视显示器 (HUD) 的替代品,通过向驾驶员提供更准确的信息,同时让他们的眼睛注视路面,从而改善道路安全。
“我们希望将信息投射到驾驶员视野中的任何位置,但不会造成压倒性或分散注意力,”Skirnewskaja 说道。“我们不想提供任何与当前驾驶任务不直接相关的信息。”
该团队开发了一种增强现实全息点云视频投影系统,可以在驾驶员视野内显示与现实生活中的物体大小和距离一致的物体。该系统将 3D 全息设置的数据与 LiDAR(光检测和测距)数据相结合。激光雷达使用脉冲光源照射物体,然后测量反射光脉冲以计算物体距光源的距离。
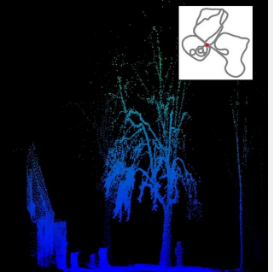
研究人员通过扫描伦敦市中心伦敦大学学院校园的马莱特街来测试该系统。来自 LiDAR 点云的信息被转换为分层 3D 全息图,由多达 400,000 个数据点组成。为驾驶员进行 360° 障碍物评估的概念源于细致的数据处理,确保每个物体的深度清晰可见。
研究人员加快了扫描过程,以便实时生成和投影全息图。重要的是,扫描可以提供动态信息,因为繁忙的街道每时每刻都在变化。
“我们收集的数据可以共享并存储在云端,这样任何路过的司机都可以访问它——这就像我们每天使用的导航应用程序的更复杂版本,用于提供实时交通信息,”说斯基尔纽斯卡娅。“通过这种方式,系统是动态的,可以适应不断变化的条件,例如危险或障碍物在街道上或路外移动。”
虽然从不同地点收集更多数据可以提高准确性,但研究人员表示,他们的研究的独特贡献在于,通过从卡车或建筑物等特定物体的单次扫描中明智地选择数据点来实现 360° 视图,从而能够对道路进行全面评估危险。
“我们可以扫描单个物体的多达 400,000 个数据点,但显然这数据量很大,并且使得实时扫描、提取和投影有关该物体的数据变得更具挑战性,”Skirnewskaja 说。“只需 100 个数据点,我们就可以知道该物体是什么以及它有多大。我们需要获得足够的信息,以便驾驶员知道周围有什么。”
今年早些时候,Skirnewskaja 和她的同事在伦敦科学博物馆使用加载了系统 LiDAR 数据的虚拟现实耳机进行了虚拟演示。会议的用户反馈帮助研究人员改进了系统,使设计更具包容性和用户友好性。例如,他们对系统进行了微调以减轻眼睛疲劳,并考虑了视力障碍。
“我们想要一个可访问且具有包容性的系统,以便最终用户能够适应它,”Skirnewskaja 说。“如果这个系统会让人分心,那么它就不起作用。我们想要的东西对驾驶员有用,并提高所有道路使用者(包括行人和骑自行车者)的安全。”
研究人员目前正在与谷歌合作开发这项技术,以便可以在真实的汽车中进行测试。他们希望在 2024 年在公共或私人道路上进行道路测试。
该研究得到德国经济基金会和英国研究与创新 (UKRI) 旗下工程和物理科学研究委员会 (EPSRC) 的部分支持。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。